AraMIMO API
As mentioned in ARA Infrastructure, ARA is equipped with hardware and software components for enabling wireless research in massive MIMO. As part of MIMO in ARA (we call as AraMIMO), we provide APIs for monitoring Skylark applications, specifically the status of Skylark components and links on the BS. At present, ARA provides monitoring, and measurement related APIs on the BS and configuration related APIs on the AraMIMO UEs. However, we plan to add more APIs enabling users to configure the parameters such as frequency, bandwidth, and gain on the BS.
AraMIMO BS API
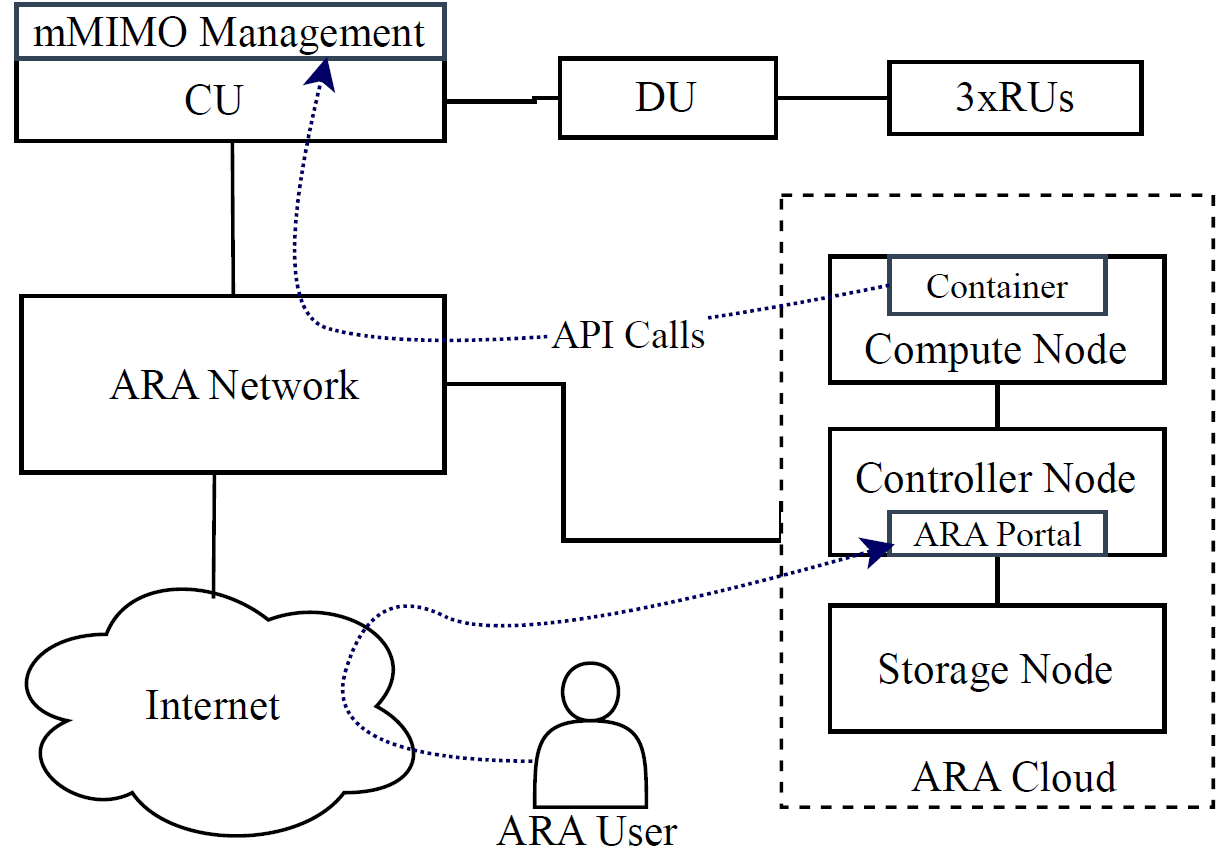
The BS APIs are packed within the container that communicates with the API server running on the Skylark CU and returns the required information to the users. The architecture of AraMIMO BS API is shown below.
AraRAN_Expt2 provides instructions for creating and launching containers equipped with AraMIMO APIs while the source of APIs are available in AraMIMO GitLab project. The container is integrated with a CLI providing commands for monitoring MIMO-related components and attributes. The AraMIMO CLI can be launched by running the following command inside the container.
ara-sklk-cli.py
The AraMIMO BS API currently supports following commands which can be executed from the container.
get_center_freq Return the center frequency on all radios
get_config Return the current BS configuration
get_connected_ues Returns the list of connected UEs
get_csi_data Returns the CSI data
get_main_stats Returns the detailed system statistics
get_mcs Print the average MCS index for UEs
get_phy_config Print the PHY configuration parameters
get_snr Print the SNR of connected UEs
get_ue_bus_rates Print the bus rates in Mbps
get_ue_data_rates Print the data rate in Mbps
get_ue_stats Print the statistics of connected UEs
help List the available commands and options with "help"
history View, run, edit, and save past commands.
quit Exit from the AraMIMO CLI
Some of the commands enable users to provide options such as exporting
output to a CSV file. To check the options for each command type
help before the command as shown below.
help <command>
Example Scripts
Besides the CLI, the AraMIMO container includes specific scripts that
help users to automate their MIMO-related measurement. The scripts are
included in the container in the aramimo directory and the source
files are provided in the AraMIMO GitLab project. The scripts can
be modified to suit user’s experimental requirement on capturing the
data and saving output to the files in required formats. Note that
each script first establishes a socket connection to the CU to obtain
required information. Each example script is developed with the
following sequence of steps.
Import required libraries
Create the socket connection to the CU
Call the specific APIs
Parse the returned data
Note: This section is not complete and will be updated as more commands are added to the API.
AraMIMO UE API
Similar to the BS wrapper APIs above, AraMIMO also provides APIs for control and configuration of the AraMIMO UEs along with measurement APIs. The UE API architecture is a little bit different than the BS APIs since UE APIs provide configuration control of the UEs to the experimenters. Therefore, the container with UE APIs has to be launched on the particular compute node which is connected to the UE that is reserved for the experiment. The architecture of the UE APIs is shown below.
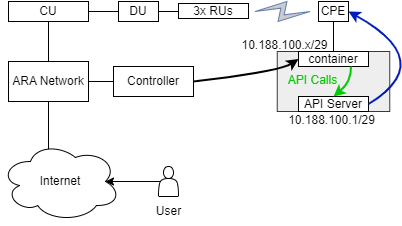
The API server is running on the host computer and the container is running the API client. The container has access to the API server on the particular host computer which is reserved for the experiment. Some of the APIs availble for the AraMIMO UEs are shown below.
get_config Return the current UE configuration
get_phy_stats Returns the detailed statistics
get_connection_status Returns current connection status of the UE
get_conn_uptime Returns the uptime of the UE
set_close_radio Close the Radio PHY
set_configure_radio Configure the radio to start transmission
set_tx_gain Set the Tx gain for the UE
set_rx_gain Set the Rx gain for the UE (Rx gain is adaptive)
set_single_stream Set the UE to communicate using single stream
set_dual_stream Set the UE to communicate using dual streams